
When we train computer vision models, we often take ideal photos of our subjects. We line up our subject just right and curate datasets of best case lighting.
But our deep learning models in production aren't so lucky.
Deliberately introducing imperfections into our datasets is essential to making our machine learning models more resilient to the harsh realities they'll encounter in real world situations.
Degrading image quality is exactly the type of task that can be completed in post processing, without the headache of collecting more data and needing to label it.
This guide covers why blur hurts models, when to apply it, and how to add blur to a dataset in Roboflow.
The Impact of Blur in Images
Many types of imperfection can make their way into an image: blur, poor contrast, noise, JPEG compression, and more. Of these, blurring is among the most detrimental.
Researchers from Arizona State University considered the impact blurring may have on image classification, especially as compared to other techniques. In their research, blur and noise had the most adverse consequences on simple classification tasks from a variety of convolutional neural network architectures.
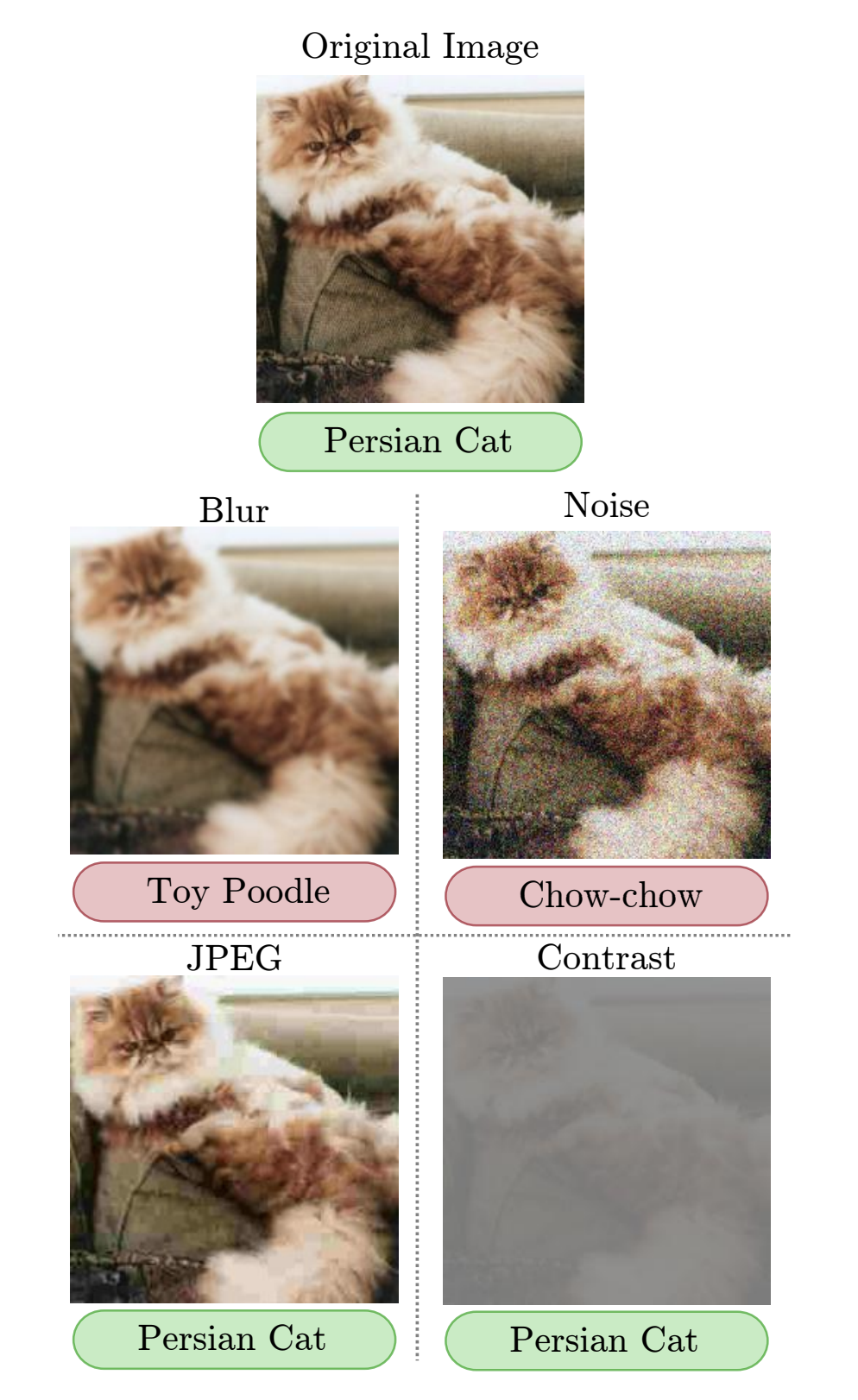
Researchers suspect blur particularly obscures convolution's ability to locate edges in early levels of feature abstraction, causing inaccurate feature abstraction early in a network's training.
When to Use Blur: Preprocessing or Augmentation
There are two ways to apply blur, and the right one depends on your cameras.
- Preprocessing applies to every image, training, validation, test, and inference. Use it only when every image in production will be blurry to a similar degree, so your training data should match.
- Augmentation applies blur only to the training set, in varying amounts. Use it when some images in production will be blurry and others sharp, which is the more common case.
Most real deployments call for augmentation, because blur shows up intermittently:
- A stationary camera watching moving objects, such as a camera over traffic.
- A moving camera capturing stationary objects, such as a phone scanning a book cover.
- Both the camera and the objects moving, such as a drone over a windy field.
In each case, only some frames are blurry, so you vary blur across the training set to simulate the range the model will actually see.
When Not to Add Blur
Blur is not always the right call:
- Always-sharp capture. If your camera holds focus and nothing moves fast, like a fixed inspection station, heavy blur teaches variation the model will never encounter.
- Fine-detail targets. For small defects, thin cracks, or text in OCR, blur can erase the exact signal you need the model to read. Use little or none.
- Too much blur. Past a point, blur removes real features instead of toughening the model. Keep the maximum modest and vary it.
Match the blur to the focus and motion your cameras actually produce. If your footage is sometimes soft, train for it. If it never is, spend the augmentation budget elsewhere.
How Blur Works
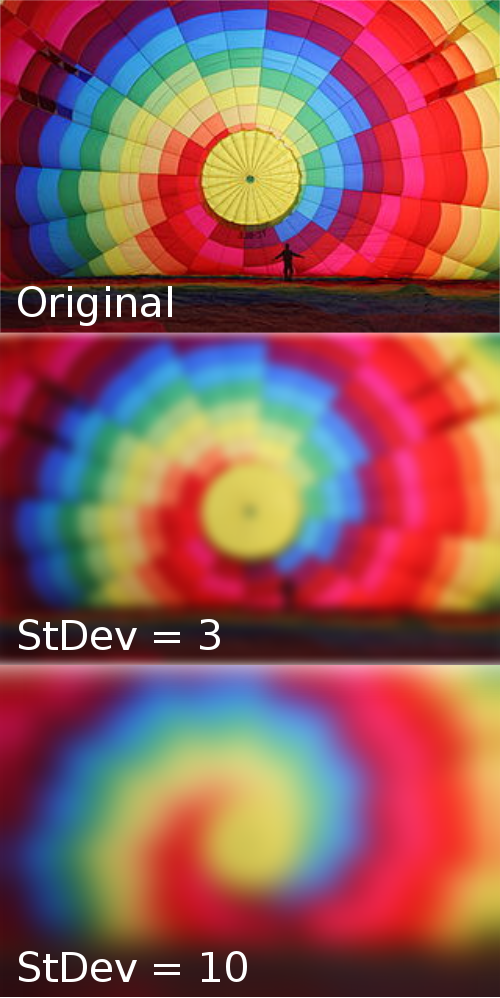
Blurring averages neighboring pixels, which reduces detail and produces the softness we perceive as blur. The amount is controlled by how many neighboring pixels are included, measured as the standard deviation of the spread in the horizontal and vertical directions. A larger standard deviation pulls in more neighbors and produces a stronger blur. This is Gaussian blur, the most common form for this kind of augmentation.
How to Add Blur in Roboflow
You can add blur to a whole dataset without writing code:
- Open your project and create a dataset version under the Versions tab.
- Add the blur augmentation. Set the maximum blur an image may receive. Each training image then gets between zero and that maximum, sampled uniformly, so the set covers a range of focus rather than one fixed level.
- Generate the version. Blur is applied only to the training set, and Roboflow records how each image was varied so you can trace which level of blur helps or hurts.
Applying augmentation at version-generation time, rather than during training, keeps your runs reproducible and faster. If you prefer code, libraries like OpenCV implement Gaussian blur, but the in-platform path keeps your train, validation, and test handling correct automatically.
Best Practices for Implementing Blur
- Vary the amount per image instead of applying a single fixed blur.
- Keep validation and test sets sharp, unless every production image will genuinely be blurry, in which case blur becomes preprocessing applied to all splits.
- Combine augmentations thoughtfully. Blur pairs with brightness and noise, but stacking everything at once can drift your data away from reality.
- Tie the maximum blur to your real motion and focus conditions.
How much blur should I add?
Keep the maximum modest and vary it per image. For fine-detail tasks like small defects or OCR, use little or no blur so it does not erase the signal you need.
Does adding blur improve accuracy?
It often helps when your real footage can be soft or motion-blurred, because the model becomes robust to it. As with any augmentation, validate the change against a clean test set rather than assuming it helps.
What is Gaussian blur?
Gaussian blur softens an image by averaging each pixel with its neighbors, weighted by a Gaussian. The standard deviation controls how many neighbors are included and therefore how strong the blur is.
Add blur and other augmentations to your dataset in Roboflow, generate a version, and train a model like RF-DETR on the result. For the full menu of options, see our guide to data augmentation, and for two augmentations that pair well with blur, see adding noise and random crop.
Happy building!
Cite this Post
Use the following entry to cite this post in your research:
Joseph Nelson. (Mar 11, 2026). The Importance of Blur as an Image Augmentation Technique. Roboflow Blog: https://blog.roboflow.com/using-blur-in-computer-vision-preprocessing/