
Tiling splits a large image into smaller patches so small objects (cars, people, buildings in aerial and satellite shots) take up more pixels and become far easier to detect than they would after the whole image is shrunk to fit the model. Apply it consistently in both training and inference so objects appear at the same scale throughout, and in Roboflow you can enable it as a preprocessing step on a dataset version and add it to inference with the Image Slicer block in Workflows.
In computer vision, tiling is the process of dividing a large image into multiple smaller image patches, known as tiles, and processing each tile independently.
Tiling is particularly useful for aerial imagery and small object detection tasks. Similar to how the human eye struggles to identify distant objects, computer vision models often have difficulty detecting small objects because they occupy only a tiny portion of the image and provide limited visual information for accurate prediction.
A common solution is to effectively "zoom in" on the image. By splitting a large image into smaller tiles, each tile contains a more detailed view of a specific region, allowing the model to better learn and detect small objects during both training and inference.
To achieve the best results, tiling should be applied consistently during both training and inference, using tiles of similar dimensions.
In this guide, we explore tiling and how it can be applied across the full computer vision pipeline, from training to inference, to improve performance in aerial imagery tasks.
Why is Tiling Important?
- Improves Small Object Detection: Large images are often resized before being passed to a model, causing small objects to shrink and lose detail. Tiling preserves object detail by processing smaller image regions at a higher effective resolution.
- Reduces Information Loss from Resizing: Instead of shrinking an entire high-resolution image to fit the model's input size, tiling allows each section of the image to be processed separately, retaining more visual information.
- Increases Detection Accuracy: Because objects occupy more pixels within each tile, the model can better distinguish object features and make more accurate predictions.
- Provides a Larger Effective Zoom Level: Each tile represents a smaller portion of the original image, giving the model a closer view of the scene without requiring additional image magnification.
- Enables Processing of Very Large Images: High-resolution aerial, satellite, and industrial images can exceed a model's input size or available memory. Tiling breaks these images into manageable pieces that can be processed individually.
- Improves Performance in Aerial and Satellite Imagery: Objects such as cars, people, buildings, and vehicles often occupy only a small fraction of the image. Tiling makes these objects more prominent, leading to better detection results.
Why Is Tiling Needed During Both Training and Inference?
Take a model trained after tiling a dataset to detect cars in aerial imagery as an example. During training, tiling splits large images into smaller patches, making cars appear larger and easier for the model to learn.
However, if tiling is not applied during inference, the model receives the original large image, where cars occupy only a small number of pixels. As a result, the model may struggle to accurately localize objects and may produce imprecise detections, often identifying larger regions than necessary. The example below demonstrates this effect:

Applying the same tiling strategy during inference ensures that objects appear at a similar scale to the training data. This allows the model to detect and localize objects more accurately, resulting in significantly better detection performance, as shown below:

How to Apply Tiling During Training?
Tiling is an easy-to-use preprocessing option in Roboflow that can be enabled when creating a dataset version.
To apply tiling during training, first make sure you have an annotated dataset. If you don't, you can fork one of the many datasets available on Roboflow Universe (for example, the Aerial Maritime dataset).
Within your dataset, create a new dataset version and navigate to the Preprocessing section. From there, add tiling as a preprocessing step and configure the desired tile grid. Roboflow will automatically split each image into smaller tiles when generating the dataset version.
The video below demonstrates how to create a new dataset version with tiling enabled.
After the version is generated, continue training your model using the tiled dataset version just as you would with any other dataset.
How to Apply Tiling During Inference?
Roboflow Workflows includes an Image Slicer block that can split input images into overlapping or non-overlapping tiles during Inference.
Roboflow Workflows is a visual, low-code, drag-and-drop web application for building end-to-end computer vision pipelines by connecting modular blocks such as AI models, image preprocessing steps, and logic components.
Using these blocks, you can design a workflow that applies tiling to an image before running inference with a model.
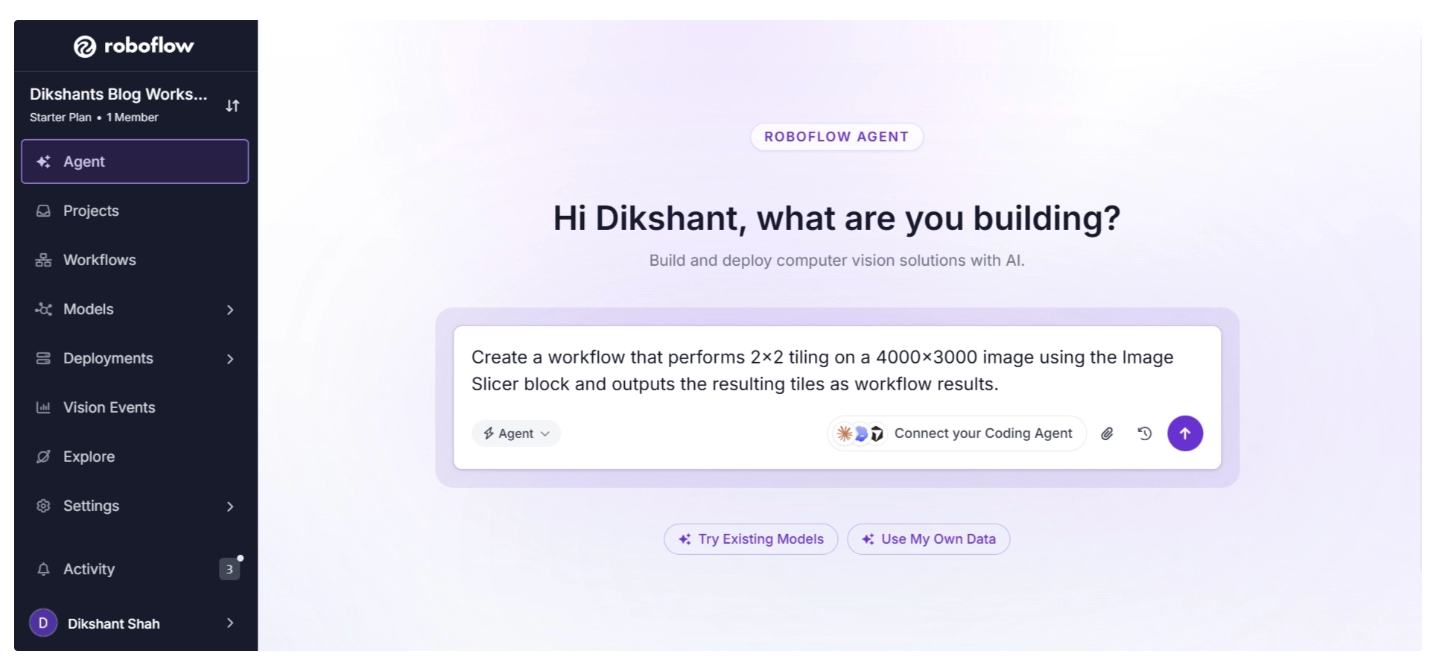
To create a Roboflow workflow, you can try Roboflow Agent available in your workspace after logging in. Here's the workflow we're going to create.
It allows you to generate workflows for a wide range of computer vision tasks using simple natural language prompts. For example, you can use a prompt like:
“Create a workflow that performs 2×2 tiling on a 4000×3000 image using the Image Slicer block and outputs the resulting tiles as workflow results.”
Note: The 4000×3000 resolution refers to the original image resolution in the Aerial Maritime dataset used as example in this guide.
The workflow below was generated using this prompt. It takes an input image, performs 2×2 tiling, and outputs the resulting tiles.
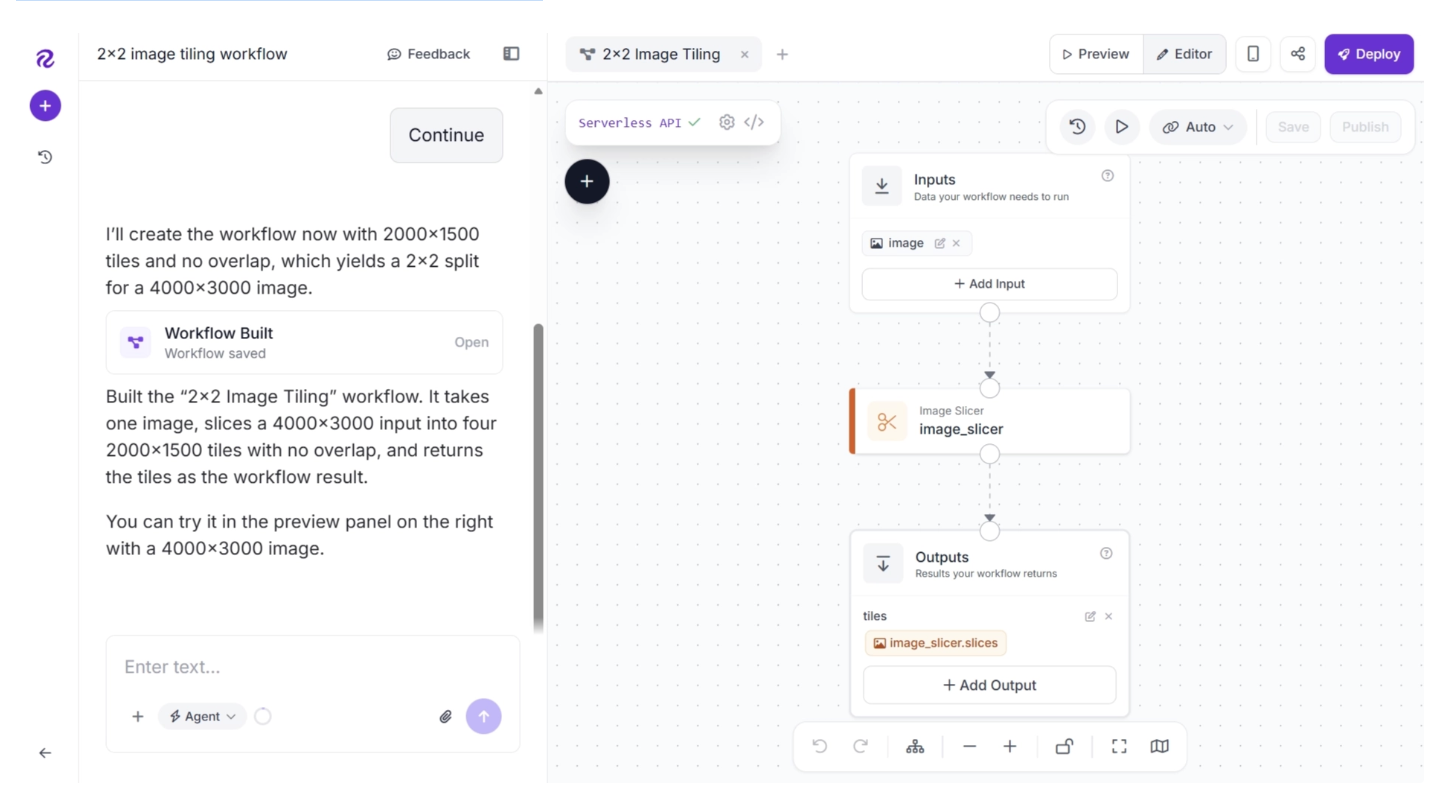
You can test the workflow directly within the Workflow UI by clicking the “Preview” button in the top-right corner. This opens a testing interface where you can drag and drop a image into the workflow to inspect the results.
When an image from the Aerial Maritime dataset is provided as input, the workflow splits it into a 2×2 grid, producing four tiles, as shown below.
You can continue chatting with the agent to add more functionality to the workflow by clicking the icon to the right of the Feedback button. After generating the initial workflow, I then asked the agent to:
“Perform object detection on each tile using the Aerial Maritime model that I trained and is available in my workspace. Then stitch the detections back together and visualize the final results using bounding boxes, assigning a different color to each class.”
It generated the workflow shown below:
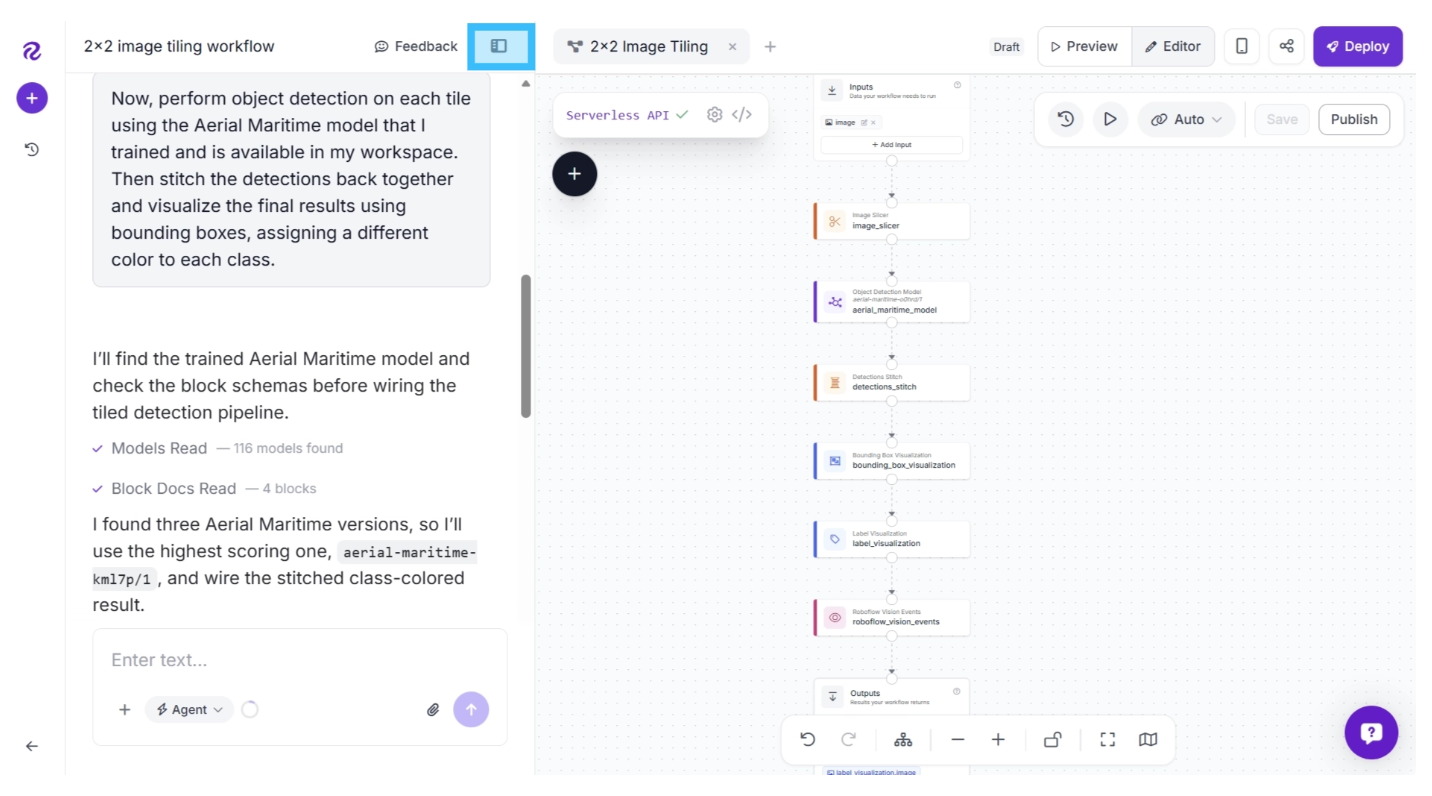
The workflow takes an input image, applies 2×2 tiling, performs object detection using a model trained on 2×2 tiled Aerial Maritime dataset on each tile, then merges the detections into a single result and visualizes the detections as shown below:
The image below was used as the test input for the workflow, taken from the Aerial Maritime dataset.

The image below shows the output produced by the workflow when applied to this test image.

In this way, tiling can also be applied during inference using Roboflow Workflows.
Alternatively, you can perform tiling during inference in a Python script by preprocessing the input image before passing it to your model. This can be done using the InferenceSlicer class from the supervision library, which handles the slicing of large images into smaller tiles for inference.
How to Balance Accuracy vs Performance with Tiling?
Tiling can significantly improve accuracy for small object detection tasks, especially in aerial and satellite imagery where objects may occupy only a few pixels in the original image. However, tiling introduces several trade-offs that should be carefully considered.
Benefits of Tiling
- Improves small object detection by increasing object size relative to the image, making tiny objects easier to detect.
- Improves accuracy in dense scenes by helping detect closely packed objects.
- Preserves fine details by reducing information loss compared to aggressive resizing.
- Enhances performance on high-resolution imagery such as aerial and satellite data.
- Improves localization by helping models learn clearer object boundaries.
Drawbacks of Tiling
- Increases training time due to a larger number of generated images.
- Slows down inference because each image is split into multiple tiles for prediction.
- Raises computational cost with higher GPU and memory usage during training and inference.
- Expands dataset size, increasing storage and preprocessing requirements.
- Adds post-processing complexity for merging tile outputs and handling duplicate detections.
Rather than choosing one tiling setup immediately, it is better to test multiple dataset versions with different tile sizes and train separate models on each. Then evaluate them using precision, recall, mAP, inference latency, and resource usage.
Comparing these results helps identify the best balance between accuracy and performance for your use case.
Conclusion: Tiling During Inference with Roboflow
Tiling is a powerful technique for improving object detection performance, particularly in aerial imagery and other applications where objects occupy only a small portion of the image. By dividing large images into smaller tiles, models can retain more visual detail, learn stronger object features, and achieve more accurate detections.
For the best results, tiling should be applied consistently during both training and inference so that objects appear at a similar scale throughout the entire machine learning pipeline. While tiling can increase computational cost and inference time, the gains in accuracy often make it a worthwhile trade-off for small object detection tasks.
With Roboflow Train, tiling can be easily enabled during dataset version creation and integrated into inference pipelines using Roboflow Workflows.
Cite this Post
Use the following entry to cite this post in your research:
Dikshant Shah. (Jun 1, 2026). How to Use Tiling During Inference. Roboflow Blog: https://blog.roboflow.com/edge-tiling-during-inference/