The Jetson Orin Nano, in particular, has captured the attention of many tech enthusiasts and professionals alike.
For this tutorial, we will use the Roboflow Inference Server. The Inference Server is designed to simplify the process of running inference on almost any device. Even better, Roboflow publishes Docker images that are specifically designed for Jetsons. These images leverage TensorRT (TRT) execution, ensuring that you get the best possible performance on your Jetson Orin Nano.
To get started, first ensure that your Jetson Orin Nano is up and running. Once you have set up your device, you can start the Roboflow Inference Server using a simple Docker run command.
With the server running, the next step is to access your trained model. Get your model ID, model version, and API key from Roboflow. These will be required to perform inference. Since the train detection model we will be using is publicly available on Roboflow Universe, you will be able to use it with your own API key, even though it belongs to another user.
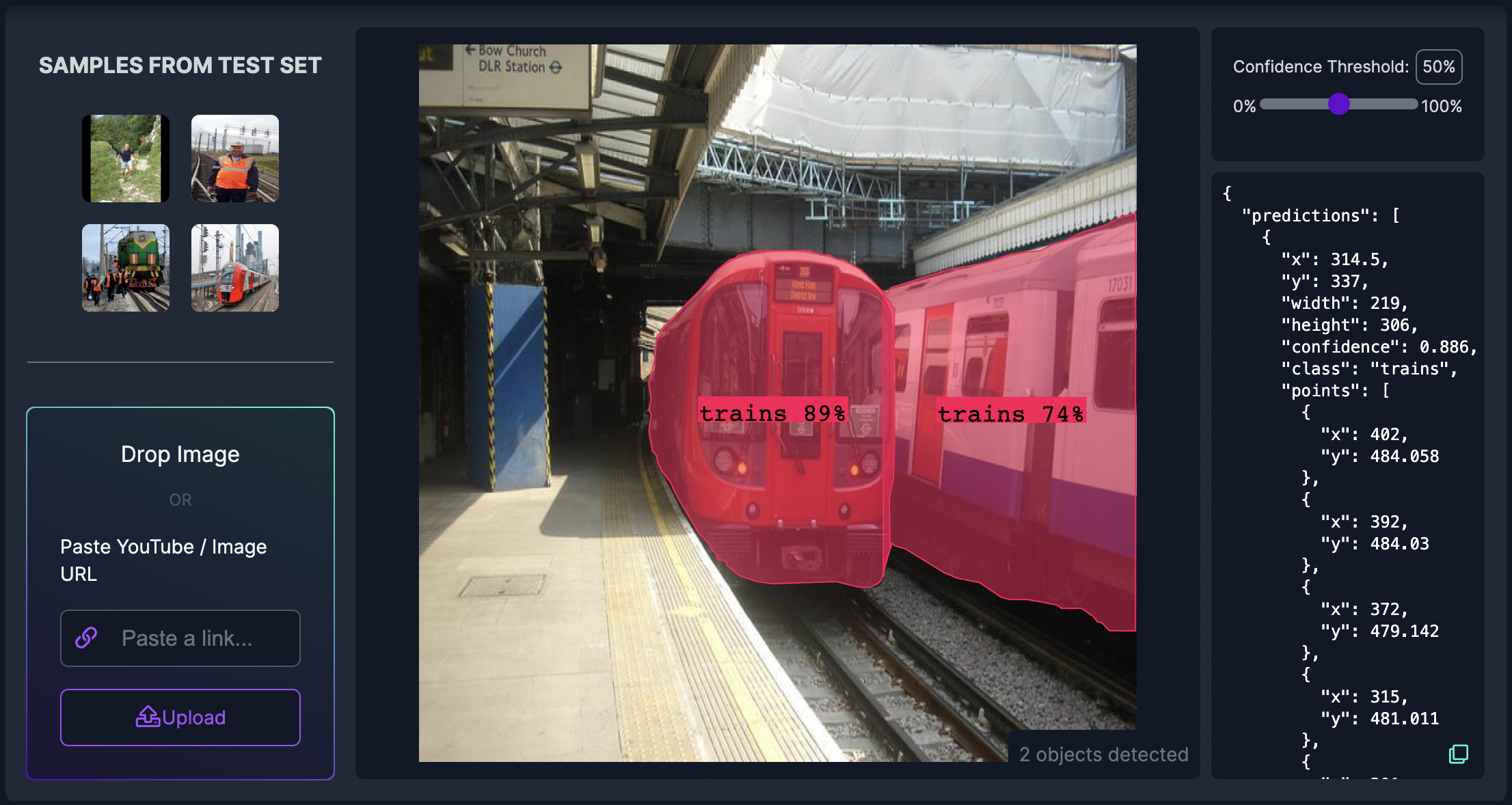
Now, you're ready to create a POST request with your image. This will send the image to the Roboflow Inference Server, which will process the image using your trained model. The server will then return a response containing the inference results. These results can be parsed to extract meaningful information about the objects detected in the image.
{'time': 0.38400292200003605, 'image': {'width': 640, 'height': 640}, 'predictions': [{'x': 344.5, 'y': 356.5, 'width': 447.0, 'height': 285.0, 'confidence': 0.86333829164505, 'class': 'trains', 'points': [{'x': 211.0, 'y': 496.02762430973013}, {'x': 189.0, 'y': 495.0035224759666}, {'x': 167.0, 'y': 489.1387147978161}, {'x': 157.0, 'y': 490.01071429139967}, {'x': 147.0, 'y': 489.0421529125008}, {'x': 143.0, 'y': 487.00776708882273}, {'x': 136.99892543000965, 'y': 479.0}, {'x': 134.9863251136244, 'y': 465.0}, {'x': 135.8435557336554, 'y': 446.0}, {'x': 132.0, 'y': 442.1472471217215}, {'x': 121.93135174165441, 'y': 441.0}, {'x': 121.71417511453723, 'y': 405.0}, {'x': 124.99055916342549, 'y': 390.0}, {'x': 121.98113772899411, 'y': 327.0}, {'x': 131.72436346079536, 'y': 292.0}, {'x': 131.9699544312003, 'y': 272.0}, {'x': 134.80248522292078, 'y': 265.0}, {'x': 135.89825541757145, 'y': 256.0}, {'x': 139.97661368688298, 'y': 249.0}, {'x': 154.0, 'y': 235.91602737094632}, {'x': 163.8276876149538, 'y': 230.0}, {'x': 163.93430978612648, 'y': 222.0}, {'x': 170.0, 'y': 215.99964936178534}, {'x': 182.0, 'y': 214.54769262907328}, {'x': 251.0, 'y': 214.9366826546555}, {'x': 258.0, 'y': 215.99296504404873}, {'x': 275.0, 'y': 222.7898217831606}, {'x': 314.0, 'y': 224.95071971025897}, {'x': 323.0, 'y': 227.72684228214152}, {'x': 339.0, 'y': 227.99914156762952}, {'x': 350.0, 'y': 231.75960427569288}, {'x': 387.0, 'y': 235.9695636559599}, {'x': 397.0, 'y': 239.80995738975906}, {'x': 405.0, 'y': 240.95414278784526}, {'x': 410.0, 'y': 243.77225933212767}, {'x': 422.0, 'y': 244.97756419187425}, {'x': 427.0, 'y': 247.7944311651627}, {'x': 434.0, 'y': 248.9578929121521}, {'x': 438.0, 'y': 251.81909494531223}, {'x': 465.0, 'y': 255.76417338985402}, {'x': 488.0, 'y': 256.99589707880045}, {'x': 511.0, 'y': 260.9960116174157}, {'x': 543.0, 'y': 270.8007421193313}, {'x': 553.0, 'y': 271.9695867014859}, {'x': 560.0, 'y': 275.97180403485805}, {'x': 566.1069342230705, 'y': 282.0}, {'x': 567.423402379246, 'y': 293.0}, {'x': 567.3368111094487, 'y': 368.0}, {'x': 567.1878779016541, 'y': 370.0}, {'x': 562.0, 'y': 374.03374723482784}, {'x': 526.0, 'y': 384.17174116560324}, {'x': 490.0, 'y': 402.01212950315556}, {'x': 463.0, 'y': 411.0200224866675}, {'x': 453.0, 'y': 412.1814660607442}, {'x': 435.0, 'y': 419.0492628480348}, {'x': 420.0, 'y': 422.1367654091879}, {'x': 395.0, 'y': 434.0247495072242}, {'x': 360.0, 'y': 444.18690960854866}, {'x': 342.0, 'y': 452.13833433539025}, {'x': 331.0, 'y': 459.0174171550626}, {'x': 299.0, 'y': 468.1290351020149}, {'x': 290.0, 'y': 474.06291648539934}, {'x': 270.0, 'y': 477.11673686565933}, {'x': 262.0, 'y': 480.10187678452974}, {'x': 242.0, 'y': 491.0704799272543}, {'x': 220.0, 'y': 493.1534354804707}, {'x': 211.0, 'y': 496.02762430973013}]}, {'x': 573.5, 'y': 547.0, 'width': 129.0, 'height': 184.0, 'confidence': 0.4539775848388672, 'class': 'rail-track', 'points': [{'x': 638.0, 'y': 638.4867329378259}, {'x': 508.71026575272236, 'y': 638.0}, {'x': 560.9724040683512, 'y': 561.0}, {'x': 582.7922206761691, 'y': 534.0}, {'x': 600.9703341207595, 'y': 505.0}, {'x': 637.0, 'y': 455.70957520864266}, {'x': 638.2904247913574, 'y': 456.0}, {'x': 638.4583694666649, 'y': 462.0}, {'x': 638.0, 'y': 638.4867329378259}]}, {'x': 115.0, 'y': 538.0, 'width': 200.0, 'height': 92.0, 'confidence': 0.12480044364929199, 'class': 'rail-track', 'points': [{'x': 18.0, 'y': 573.030377477556}, {'x': 15.892087883526742, 'y': 573.0}, {'x': 15.50173146105391, 'y': 553.0}, {'x': 15.78406635851133, 'y': 535.0}, {'x': 18.0, 'y': 532.9647023933609}, {'x': 26.0, 'y': 531.7793789742841}, {'x': 56.0, 'y': 520.9479546502524}, {'x': 69.0, 'y': 518.8065642996469}, {'x': 86.0, 'y': 511.95414662787044}, {'x': 94.0, 'y': 510.8113719207422}, {'x': 110.0, 'y': 503.94069896245253}, {'x': 130.0, 'y': 498.8217109173472}, {'x': 135.0, 'y': 495.99189131609484}, {'x': 149.0, 'y': 494.83271551287817}, {'x': 153.0, 'y': 492.9683112488088}, {'x': 168.0, 'y': 492.9731195053897}, {'x': 180.0, 'y': 496.90660100221163}, {'x': 199.0, 'y': 495.9837238845184}, {'x': 211.00977528358203, 'y': 501.0}, {'x': 211.01303966904248, 'y': 504.0}, {'x': 209.0, 'y': 506.0218221371695}, {'x': 204.0, 'y': 507.09926858657803}, {'x': 194.0, 'y': 514.0627118307981}, {'x': 141.0, 'y': 531.1905663065942}, {'x': 129.0, 'y': 537.0211394333895}, {'x': 116.0, 'y': 540.1746201167995}, {'x': 107.0, 'y': 545.0249450486224}, {'x': 93.0, 'y': 548.1377122582276}, {'x': 82.0, 'y': 555.0361537703855}, {'x': 70.0, 'y': 558.1210621599129}, {'x': 65.0, 'y': 561.0483066177301}, {'x': 40.0, 'y': 565.1131887877335}, {'x': 18.0, 'y': 573.030377477556}]}, {'x': 617.5, 'y': 310.5, 'width': 43.0, 'height': 37.0, 'confidence': 0.051128894090652466, 'class': 'trains', 'points': [{'x': 638.0, 'y': 329.28539285772223}, {'x': 633.0, 'y': 329.0144991965105}, {'x': 629.0, 'y': 326.0838700633589}, {'x': 621.0, 'y': 326.0214567735048}, {'x': 618.0, 'y': 324.13700834965846}, {'x': 612.0, 'y': 324.02386377850274}, {'x': 597.0, 'y': 320.03883596628896}, {'x': 595.6757821153547, 'y': 315.0}, {'x': 595.9584850892219, 'y': 292.0}, {'x': 638.0, 'y': 291.6239770224582}, {'x': 638.0, 'y': 329.28539285772223}]}, {'x': 27.0, 'y': 200.5, 'width': 54.0, 'height': 299.0, 'confidence': 0.018806636333465576, 'class': 'trains', 'points': [{'x': 50.0, 'y': 350.0678690503257}, {'x': 45.0, 'y': 347.04550892354536}, {'x': 41.0, 'y': 350.05961446642635}, {'x': 38.0, 'y': 350.3683066834566}, {'x': 0.8517725391282533, 'y': 350.0}, {'x': 0.9747866838975832, 'y': 348.0}, {'x': 4.940099350538692, 'y': 345.0}, {'x': 3.9927765883490127, 'y': 341.0}, {'x': 7.0, 'y': 332.9791980053038}, {'x': 12.0, 'y': 330.99662069360113}, {'x': 30.0, 'y': 329.9289486479113}, {'x': 32.99649621501977, 'y': 326.0}, {'x': 29.0, 'y': 324.0352620917415}, {'x': 0.9492579827519556, 'y': 322.0}, {'x': 1.0, 'y': 51.736213595698494}, {'x': 17.0, 'y': 52.98177096188778}, {'x': 21.0, 'y': 55.86397854474082}, {'x': 31.0, 'y': 59.832902878704665}, {'x': 39.0, 'y': 60.994526725356494}, {'x': 54.10284436110869, 'y': 68.0}, {'x': 54.046665541361946, 'y': 193.0}, {'x': 52.12380228692915, 'y': 203.0}, {'x': 51.10283931955072, 'y': 233.0}, {'x': 54.01215736711536, 'y': 257.0}, {'x': 54.06960009285053, 'y': 314.0}, {'x': 50.00975058378319, 'y': 322.0}, {'x': 54.019254253358504, 'y': 327.0}, {'x': 54.00828121208217, 'y': 334.0}, {'x': 53.01847237239503, 'y': 345.0}, {'x': 50.0, 'y': 350.0678690503257}]}, {'x': 220.5, 'y': 159.5, 'width': 17.0, 'height': 29.0, 'confidence': 0.016441255807876587, 'class': 'traffic-light', 'points': [{'x': 226.0, 'y': 171.16769038865795}, {'x': 218.0, 'y': 171.12669863641383}, {'x': 211.88245329010874, 'y': 165.0}, {'x': 212.0, 'y': 145.60389001002468}, {'x': 229.3406804695391, 'y': 146.0}, {'x': 229.2320336475416, 'y': 167.0}, {'x': 226.0, 'y': 171.16769038865795}]}]}
The combination of the Jetson Orin Nano and Roboflow opens up use cases for computer vision at the edge. Whether you're building a home security system, a wildlife monitoring device, an industrial inspection tool, or a train detection solution, this robust duo has you covered.
Moreover, the small footprint and low power consumption of the Jetson Orin Nano means that you can run computer vision models in almost any environment. Whether you're at the edge or in a constrained setting, deploying a powerful computer vision system is just a few steps away.